


Short Biography:
I’m a helper Professor within the Robotics Institute at Carnegie Mellon College. I received my PhD in Information Technology in the College of Bc this year. My doctorate dissertation was awarded the Alain Fournier Ph.D. Dissertation Annual Award. Just before joining CMU, I had been an investigation Researcher employed in the Disney Research, Zurich lab. Through my work, I make an effort to develop fundamental comptuational models for motor control, motion planning, physical simulation and computational fabrication. TedXZurich and Robotics Institute Seminar talks I gave on these topics can be found online. In 2016 I had been the person receiving an Apple Early Career Faculty Award.
Research Interests:
Next-gen Robots: Within the not-so-distant future, a wealthy ecosystem of robots for service, assistive care, therapy, personal augmentation, education and entertainment is going to be tightly integrated within our lives. To achieve their full potential, these automatic devices have to become much safer, more nimble and much more versatile compared to rugged machines produced for industrial applications. Drawing insights from statistical analysis and optimal control, and leveraging emerging digital fabrication technologies, let me develop computational appliances will shape the way in which generations to come of robots are made, manufactured, controlled, and just how we communicate with them.
Computational Fabrication: As key advantages over traditional manufacturing, 3D Printing is unmatched in being able to create complex geometric structures, it employs a constantly-expanding selection of materials (rigid, compliant, conductive, etc), has the capacity to create one-off parts free of charge, and it is more and more available to new classes of designers.

These exciting new abilities are paving the best way to a shift from mass production to personalized design and fabrication. However, additionally they introduce significant research challenges: the vast space of design options exceeds our current capability to create content for digital fabrication. To beat this technological barrier, I’m thinking about computational design techniques that develop forward and inverse physics-based models.

Motor Control Models: Humans and creatures move with outstanding skill, elegance and agility. Even though we devote little considered to getting around, even everyday tasks like walking need a tremendously complex interplay of physical information processing, motion planning, and coordinated muscle control. Certainly one of my primary research goals would be to read the mathematical, biomechanical and motor-learning concepts needed to breed the number of motions displayed by humans and creatures. Additionally to direct applications to character animation and robotics, this type of research may potentially inform problem domains as diverse as staring at the locomotion behavior of dinosaurs or predicting an individual’s capability to walk after surgery.
Novel Tools for Animation: Animation plays a main role in allowing the immersive virtual worlds we have seen in game titles, CG movies and virtual training simulators. Because of the growing interest in elevated complexity and realism during these digital worlds, the evolution of animation techniques has not been more essential.
Consequently, I’m thinking about developing new methods for various different application domains: from techniques that leverage the ability of professional animators, to tools that permit children to produce animated versions of the imaginative tales from models for simulating the behaviour of passive objects, to techniques that breathe existence into virtual figures from highly accurate simulations from the human musculoskeletal system, to autonomous digital creatures that may be directed as though these were actors underneath the guidance of the film director.
Press

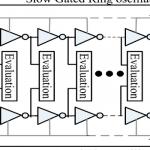 Time to digital converter thesis proposal
Time to digital converter thesis proposal Drug abuse essay thesis proposal
Drug abuse essay thesis proposal Sample research design+thesis proposal letter
Sample research design+thesis proposal letter Community centre architecture thesis proposal
Community centre architecture thesis proposal Maria wesslen phd thesis proposal
Maria wesslen phd thesis proposal






